最小生成树
我们定义无向连通图的 最小生成树 (Minimum Spanning Tree,MST)为边权和最小的生成树。
注意:只有连通图才有生成树,而对于非连通图,只存在生成森林。
Kruskal 算法
Kruskal 算法是一种常见并且好写的最小生成树算法,由 Kruskal 发明。该算法的基本思想是从小到大加入边,是个贪心算法。
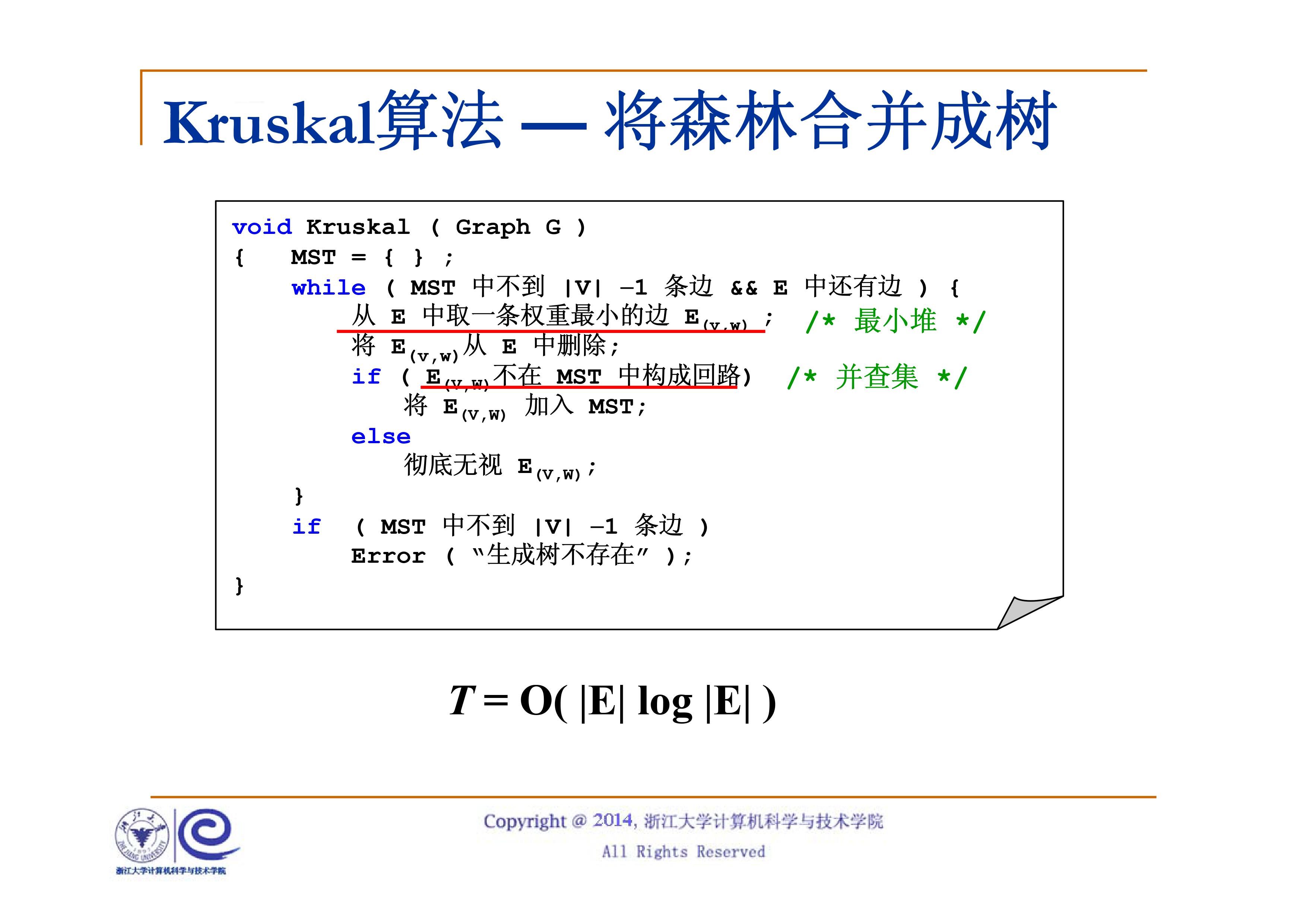
算法虽简单,但需要相应的数据结构来支持……具体来说,维护一个森林,查询两个结点是否在同一棵树中,连接两棵树。
抽象一点地说,维护一堆 集合,查询两个元素是否属于同一集合,合并两个集合。
其中,查询两点是否连通和连接两点可以使用并查集维护。
如果使用优化后的排序算法,并且使用优化后的并查集,就可以得到时间复杂度为 O(ElogE) 的 Kruskal 算法。
模板
1
2
3
4
5
6
7
8
9
10
11
12
void Kruskal() {
for (int i = 1; i <= M; i++) {
if (cnt == N - 1) break;
int fx = find(ed[i].x);
int fy = find(ed[i].y);
if (fx != fy) {
merge(fx, fy);
sum += ed[i].w;
cnt++;
}
}
}
Prim 算法
Prim 算法是另一种常见并且好写的最小生成树算法。该算法的基本思想是从一个结点开始,不断加点(而不是 Kruskal 算法的加边)。
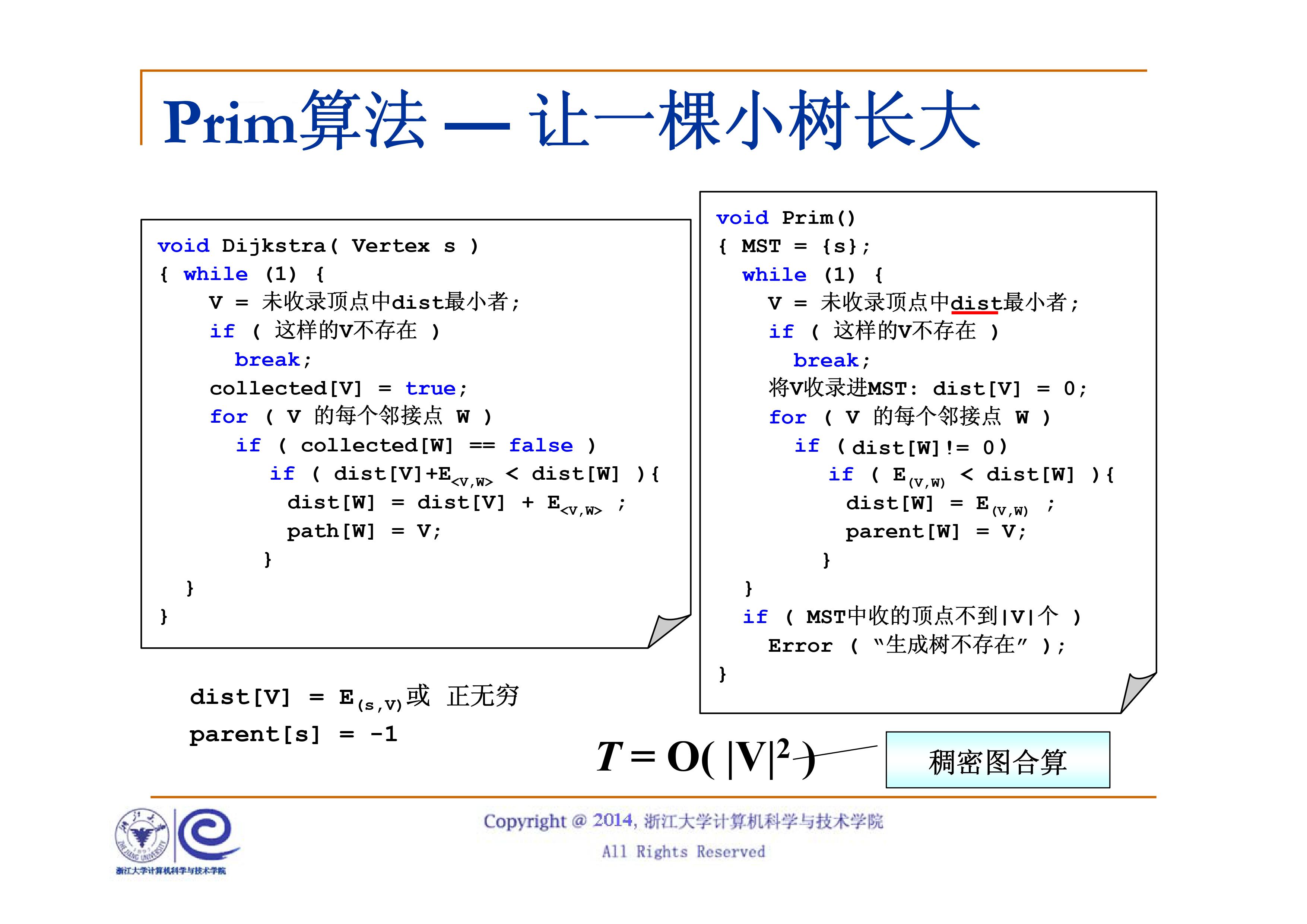
具体来说,每次要选择距离最小的一个结点,以及用新的边更新其他结点的距离。
其实跟 Dijkstra 算法一样,每次找到距离最小的一个点,可以暴力找也可以用堆维护。
堆优化的方式类似 Dijkstra 的堆优化,但如果使用二叉堆等不支持 O(1) decrease-key 的堆,复杂度就不优于 Kruskal,常数也比 Kruskal 大。所以,一般情况下都使用 Kruskal 算法,在稠密图尤其是完全图上,暴力 Prim 的复杂度比 Kruskal 优,但 不一定 实际跑得更快。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
// 开始随便取一个节点加入MST中
for (int i = 1; i <= N; i++) dis[i] = map[1][i];
vis[1] = true;
int min, min_index; // 最短的距离及其下标
for (int i = 1; i < N; i++) {
min = INF; // 默认距离MST为最大值
// 寻找离MST最近的节点
for (int j = 1; j <= N; j++) {
if (!vis[j] && dis[j] < min) {
min = dis[j]; // 更新最短距离
min_index = j;
}
}
vis[min_index] = true;
sum += dis[min_index];
for (int j = 1; j <= N; j++) {
if (!vis[j] && map[min_index][j] < dis[j]) {
dis[j] = map[min_index][j];
}
}
}
【模板】最小生成树
思路:一道简单的模板题,不过Prim看了好久才明白(跟Dijkstra一样。。。)
Prim算法(暴力)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
#include <iostream>
#include <cstring>
using namespace std;
const int INF = 0x3f3f3f3f;
bool vis[5005];
int dis[5005];
int map[5005][5005];
int main() {
int N, M, sum;
cin >> N >> M;
// 初始化map
memset(map, 0x3f, sizeof(map));
for (int i = 1; i <= N; i++) map[i][i] = 0;
// 读入边
int x, y, z;
for (int i = 1; i <= M; i++) {
cin >> x >> y >> z;
map[x][y] = min(map[x][y], z);
map[y][x] = min(map[y][x], z);
}
// 开始随便取一个节点加入MST中
for (int i = 1; i <= N; i++) dis[i] = map[1][i];
vis[1] = true;
int min, min_index; // 最短的距离及其下标
for (int i = 1; i < N; i++) {
min = INF; // 默认距离MST为最大值
// 寻找离MST最近的节点
for (int j = 1; j <= N; j++) {
if (!vis[j] && dis[j] < min) {
min = dis[j]; // 更新最短距离
min_index = j;
}
}
vis[min_index] = true;
sum += dis[min_index];
for (int j = 1; j <= N; j++) {
if (!vis[j] && map[min_index][j] < dis[j]) {
dis[j] = map[min_index][j];
}
}
}
cout << sum << endl;
}
Kruskal算法(优化后的并查集)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
#include <iostream>
#include <algorithm>
#include <cstring>
using namespace std;
const int INF = 0x3f3f3f3f;
int N, M, cnt = 0, sum = 0;
struct edge{
int x;
int y;
int w;
}ed[200005];
bool cmp(const edge &a, const edge &b) {
return a.w < b.w;
}
int fa[5005], rk[5005];
void init(int n) {
for (int i = 1; i <= n; i++) {
fa[i] = i;
rk[i] = 1;
}
}
int find(int x) {
while (x != fa[x]) x = fa[x] = fa[fa[x]];
return x;
//return x == fa[x] ? x : (fa[x] = find(fa[x])); // 递归实现
}
void merge(int i, int j) {
int x = find(i);
int y = find(j);
if (rk[x] <= rk[y]) fa[x] = y;
else fa[y] = x;
if (rk[x] == rk[y] && x != y) rk[y]++;
}
void Kruskal() {
for (int i = 1; i <= M; i++) {
if (cnt == N - 1) break;
int fx = find(ed[i].x);
int fy = find(ed[i].y);
if (fx != fy) {
merge(fx, fy);
sum += ed[i].w;
cnt++;
}
}
}
int main() {
cin >> N >> M;
init(N);
for (int i = 1; i <= M; i++) {
cin >> ed[i].x >> ed[i].y >> ed[i].w;
}
sort(ed + 1, ed + 1 + M, cmp);
Kruskal();
cout << sum << endl;
}